

Textile Haut & smarte Sensorik: Robo-Rochen auf Munitionssuche
Um im Meer versunkene Kriegsgeschosse zuverlässig zu detektieren, kommen bislang Spezial-U-Boote zum Einsatz. Für enge und schwer erreichbare Stellen übernehmen noch immer geschulte Spezialtaucher*innen diese komplexe und teilweise gefährliche Aufgabe.
Ein deutsches Forschungskonsortium unter Beteiligung des Fraunhofer IZM nutzt jetzt einen Unterwasser-Roboter, der so wendig und beweglich ist wie ein Mantarochen und zukünftig dank neu-entwickelter, vernetzter Sensoren in seinen Flügelflächen mehr Informationen aus der Umgebung erhalten kann. So wird beispielsweise die Metalldetektion von Objekten auf dem Meeresboden oder leicht vergraben unter der Erde ermöglicht.
Autonome Unterwasser-Vehikel oder auch AUVs gibt es schon seit einigen Jahren. Hightech-Unternehmen für zuverlässige Unterwasserkommunikation und innovative bionische Lösungen wie die EvoLogics GmbH haben diese Roboter, inspiriert von Tieren wie Mantarochen, optisch und anatomisch an die Meereswelt angepasst.
Mit ihrer Flossenspannweite können diese Fische große Flächen abdecken, dank ihrer beweglichen Wirbel aber auch sehr kleine Biegeradien realisieren und somit leicht durchs Meer gleiten. Bisher waren die Roboter-Mantas aber noch nicht so smart, dass sie die gefährdeten Spezialtaucher*innen ablösen konnten, die beispielsweise vor dem Ausbau eines Offshore-Windparks oder interkontinentaler Leitungen für mehrere Stunden den Meeresgrund nach versunkener hochexplosiver Restmunition aus dem Ersten und Zweiten Weltkrieg oder anderen Metallen absuchen. Eine elektrische Lösung in Form eines Mantarochens soll nun die sichere Detektion von Gefahrgütern unter Wasser mittels vielfältiger Sensoren ermöglichen.
Im BMBF-geförderten Projekt Bionic RoboSkin sollen die robotischen Mantas eine flexible bionische Sensorhaut erhalten, die es den Unterwassermobilen erlaubt, sich autonom in ihrem jeweiligen Umfeld zurechtzufinden. Die Sensorhaut besteht aus einem Textilverbund als Träger für Sensorelemente und stellt feuchtigkeitsbeständige elektrische Verbindungen für Energieversorgung und Kommunikation bereit. Forschende vom Fraunhofer IZM haben es sich zur Aufgabe ge macht, die integrierten Sensormodule zu entwickeln, dank derer die AUVs sowohl Berührungen und Annäherungen als auch die Exploration der Umgebung erkennen und analysieren können. Das Projektkonsortium wird geleitet von der EvoLogics GmbH und hat neben den Fraunhofer-Expert*innen weitere Fachexpertise vom TITV Greiz, der Sensorik Bayern GmbH, der BALTIC Taucherei- und Bergungsbetrieb Rostock GmbH und der GEO-DV GmbH an Bord. Ihr gemeinsames Ziel: eine neue Robotergeneration schaffen, die den Menschen mit einer Vielzahl von teil- oder vollautomatischen Diensten unterstützen kann.
Aber nicht nur unter Wasser sollen die neuen Roboter das Bauen sicherer machen: Für ein zweites Anwendungsszenario übertragen die Forschenden die Sensorplattform auf einen Bodenroboter, den „Dachs“. Auch dieser soll durch GPS-Systeme gesteuert und mit sogenannten Ground Penetrating Radars ausgestattet unterirdische Metallstrukturen detektieren und Landvermessungen wie teilautonome Geo-Exploration in schwer zugänglichen Bereichen (z. B. Überwachung im Tunnelbau) durchführen.
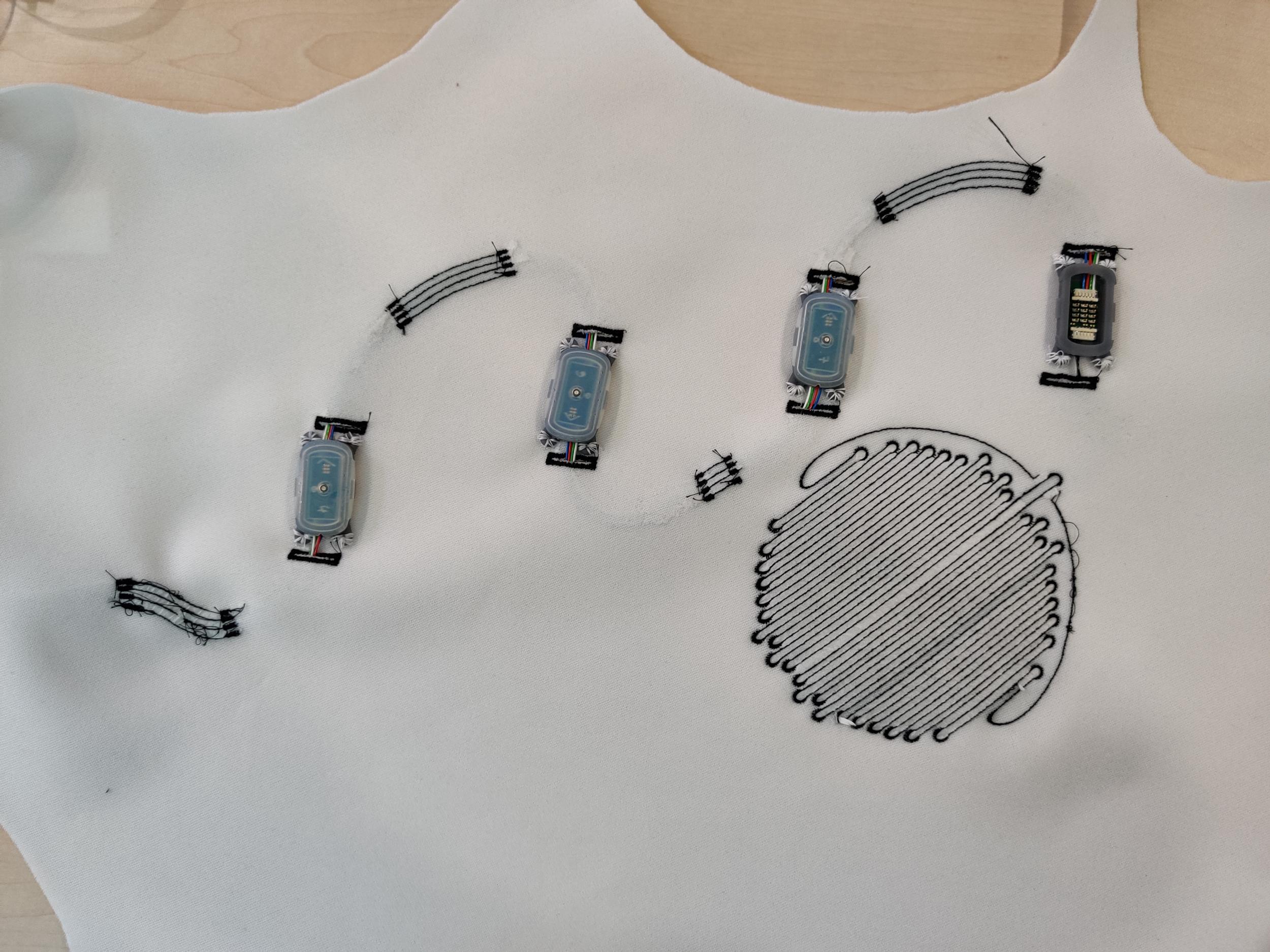
Technisch funktioniert das so: Den Robotern wird eine textile, feuchtedurchlässige und damit druckneutrale Haut verpasst, die darin integrierte Mikroelektronik ermöglicht wiederum die Funktionen von Berührungs-, Positionierungs-, Strömungs- und Bewegungssensorik. Diese Textilhaut wird wie ein Strumpf über die Flügel des Roboters gezogen, sodass diese im Stil der Soft Robotics empfindlich werden. Die Forschungsteams am Fraunhofer IZM sind dabei für die elektronische Hardware zuständig: Sie bauen unterwasserfeste Sensorknoten auf, die die vom Manta gesammelten Daten vorverarbeiten. Diese Sensorknoten müssen nicht nur funktional, sondern auch extrem miniaturisiert sein, um direkt unter der dünnen Textilhaut angebracht und mit elektrischen Leitungen versehen zu werden. Im laufenden Betrieb messen die Sensoren dann Größen wie Beschleunigung, Druck und Feuchtedurchlässigkeit. Zudem haben die Forschenden Leuchtdioden/LEDs im Leiterplattendesign integriert: Durch Aktivieren der Lämpchen kann der Roboter künftig unter Wasser mit Taucher*innen kommunizieren und beispielsweise durch Blinken zeigen, dass er in Kürze abbiegt.
Diese Komponenten und Sensorpackages wurden mit Hilfe einer stark miniaturisierten Einbetttechnologie integriert und mit einem robusten Modulgehäuse von Außeneinwirkungen wie Kälte und Flüssigkeit geschützt. Der sogenannte Footprint des eingebetteten Moduls ist mit 23 x 10,5 x 1,6 mm³ platziert auf einer Dicke von weniger als einer Schlüsselbreite ein komplettes Sensorpackage mit Mikrocontroller, Treiber, Beschleunigungssensor und übernimmt die Vorauswertung der Daten. Gleichzeitig dient das Gehäuse als Vermittler, indem es die mechanische und elektrische Kontaktierung zur Sensorhaut bietet. Bereits beim Designentwurf entschieden sich die Forschenden für einen modularen, zweiteiligen Aufbau: Das Embedding-Modul vereint die einzelnen elektronischen Bauteile auf nur wenigen Millimetern und sorgt für die Höchstintegration; das Sensormodulgehäuse bildet die mechanische Schnittstelle zur Textilhaut und sorgt für die notwendige Robustheit des Aufbaus. Das Verbindungskonzept zwischen Modul und Gehäuse funktioniert nach dem Clip-Prinzip: Durch kleine Pins, die auf der Connector-Boardhälfte der Haut angebracht wurden, und winzige Schnapphaken auf dem Sensormodul wird eine schnell lösbare Schnittstelle geschaffen. Die Modularität des Gesamtsystems ermöglicht eine aufwandfreie Neukonfiguration des Moduls.
Als nächste Schritte folgen erste Testdurchläufe mit dem Robo-Manta. Die Erkenntnisse und Ergebnisse aus Bionic RoboSkin lassen sich in weiteren Projekten einsetzen, um die maritime Sensorik, aber auch andere flexible und mobile Serviceroboter durch druckneutrale und zuverlässige Packaging-Lösungen voranzutreiben und noch smarter zu machen.
Das Projekt Bionic RoboSkin mit dem Förderkennzeichen 16ES0914 wird gefördert vom BMBF via VDI/VDE-IT im Rahmenprogramm der Bundesregierung für Forschung und Innovation 2016-2020 „Mikroelektronik aus Deutschland – Innovationstreiber der Digitalisierung“.
Fraunhofer – Institut für Zuverlässigkeit und Mikrointegration IZM